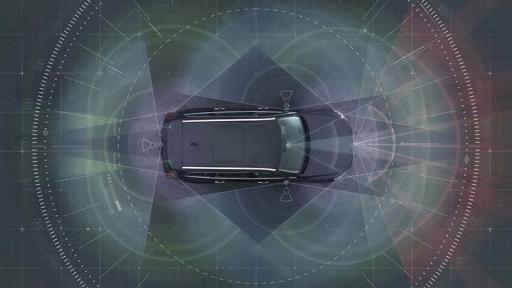
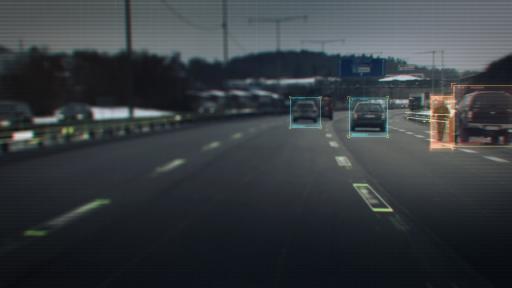
The holistic solution generates exact positioning and a complete 360° view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors.
Autonomous drive paves the way for more efficient time-management behind the wheel. The self-driving technology used in the Drive Me allows you to hand over the driving to the car when the circumstances are appropriate.

A high definition 3D digital map is the tool used to provide the vehicle with information about the surroundings. The cloud service is also connected to the traffic authorities’ control centre.

Autonomous drive paves the way for more efficient time-management behind the wheel, e.g. in commuting situations with traffic jams. You can safely interact via phone or tablets or simply choose to relax.

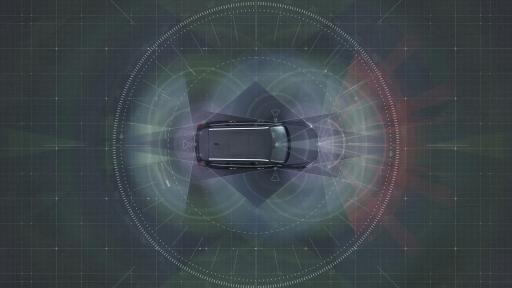
The radar technologies consists of a 76 GHz frequency-modulated, 4 radars behind the front and rear bumpers (one on each corner of the car) and 3 long-range radars.

A camera is placed in the windscreen. In addition, a trifocal camera placed behind the upper part of the windscreen is three cameras in one. Four cameras around the car monitor lane markings and objects in close proximity to the vehicle.
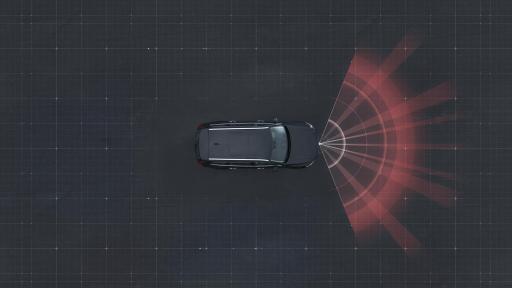
A multiple beam laser scanner is placed in the front of the vehicle. The scanner can identify objects in front of the car and ensures very high angle resolution. The unique laser has a range of 150 metres and covers a 140° field of view.
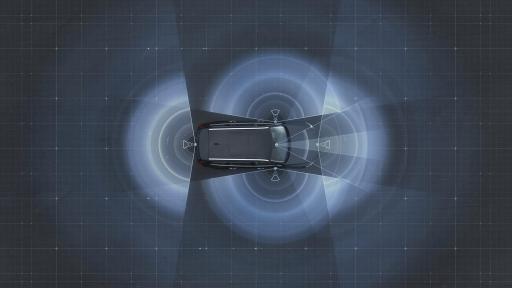
Twelve ultrasonic sensors around the car are used to identify objects close to the vehicle and support autonomous drive in low speeds.

The holistic solution generates exact positioning and a complete 360° view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors.

The holistic solution generates exact positioning and a complete 360° view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors.
The holistic solution generates exact positioning and a complete 360° view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors.
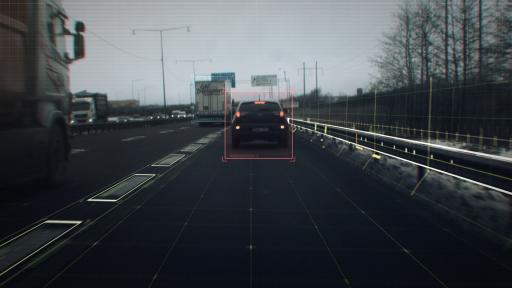
This combined 76 GHz frequency modulated, continuous wave radar and camera reads traffic signs, the road’s curvature and can detect objects on the road, such as other road users.

Long-range radars are placed in the rear and ensure rearward detection of vehicles in parallel lanes, e.g. useful when changing lanes since it can detect fast-moving vehicles approaching from behind.

Mid-range radars located behind the bumper are able to locate objects in all directions. By transmitting waves and analyse the reflected signals they monitor a full 360° around the car.

The camera in the rear bumper, is one of four cameras that detects and monitor objects in close proximity to the vehicle. There are also cameras under the outer rear-view mirrors and in the grille.

Twelve ultrasonic sensors around the car are used to identify objects close to the vehicle and support autonomous drive in low speeds.

The trifocal camera, placed in the upper part of the windscreen, is three cameras in one, providing a broad 140 view, a 45 view and a long-range narrow, 34view for depth perception and distant-object detection.

Self-driving cars are convenient and can allow drivers to use their travel time for other activities during pure transportation. This technology can also improve safety significantly and reduce fuel consumption and congestion.

Dr. Peter Mertens - Senior Vice President, Research & Development

Dr. Erik Coelingh, Techical specialist Active Safety